














一、前言
上次给大家展示了基于OpenHarmony的避障小车,我就在想能不能通过云端来控制小车的工作。正好小凌派板载了WIFI功能,小凌派官方例程中又有通过MQTT协议连接华为云的例程。在不断的尝试下,终于完成了通过华为云给小车下发工作命令的避障小车。戳链接看完整视频👉(https://ost.51cto.com/show/13049)
二、小车介绍
这是一款基于OpenHarmony系统和RK2206小凌派开发板的避障小车。同时,小车搭载了超声波测距模块、舵机模块、红外寻迹模块、直流电机模块。

图1 小车组装图
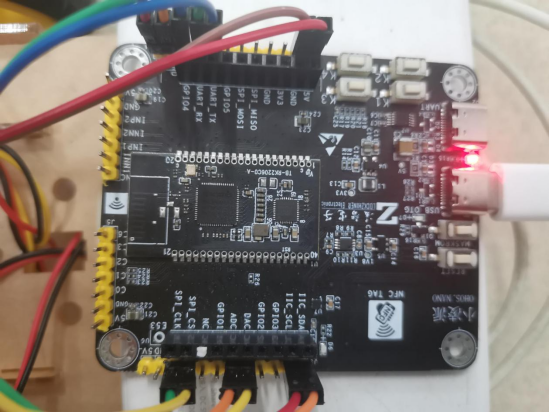
图2 小凌派开发板
三、华为云配置
在华为云中创建一个新的设备(图3),创建设备的设备密钥一定要牢记,后面要用到。

图3 创建完成界面
总体配置如图4所示。
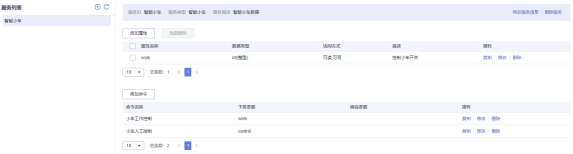
图4 华为云总体配置
创建了一个“work”属性用来接收小车当前的工作状态(图5)。

图5 “work”参数
创建了两个命令“小车工作控制”(图6)和“小车人工控制”(图7)用来控制小车工作。其中,“小车工作控制”中有三个命令,分别是:ON(工作模式)、OFF(停止模式)、CONTROL(手动控制小车模式)。“小车人工控制”中有五个命令,分别是:STOP(停止)、FORWARD(直行)、TURNLEFT(左转)、TURNRIGHT(右转)、BCAKWARD(后退)。

图6 “小车工作控制”参数

图7 “小车人工控制”参数
四、小车配置
1、连接华为云
利用华为云iot工具(图8)将填写注册设备时生成的设备ID和设备密钥,生成连接信息(ClientId、Username、Password),并修改代码中对应的CLIENT_ID、USERNAME、PASSWORD。
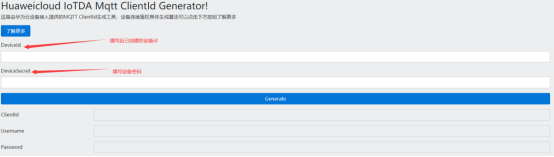
图8 华为云iot工具
将代码中的CLIENT_ID、USERNAME和PASSWORD改为生成的ClientId、Username和Password。
#define CLIENT_ID
#define USERNAME
#define PASSWORD
修改/device/rockchip/rk2206/sdk_liteos/board/src/config_network.c代码中的SSID和PASSWORD为使用WIFI的SSID和密匙,用于连接网络,设备通过WIFI访问华为云。
#define SSID
#define PASSWORD
2、小车指令接收配置
从华为云向小车下发工作指令时,可以在设备调试窗口看到华为云发送消息的body信息。“service_id”为设备的服务ID,ID为“智能小车”; “command_name”为设备命令名称,命令为“小车工作控制”;“paras”为设备命令的执行参数,参数为{ “work”:“ON”}(图9)。

图9 华为云发送消息body信息
以下是处理华为云下发命令的部分代码:
obj_cmdname = cJSON_GetObjectItem(obj_root, "command_name");
if (obj_cmdname == NULL)
{
goto EXIT;
}
if (0 == strcmp(cJSON_GetStringValue(obj_cmdname), "小车工作控制"))
{
obj_paras = cJSON_GetObjectItem(obj_root, "paras");
if (obj_paras == NULL)
{
goto EXIT;
}
obj_para = cJSON_GetObjectItem(obj_paras, "work");
if (obj_para == NULL)
{
goto EXIT;
}
if (0 == strcmp(cJSON_GetStringValue(obj_para), "ON"))
{
m_app_status.work = 1;
g_car_status = CAR_TRACE_STATUS;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "OFF"))
{
m_app_status.work = 0;
g_car_status = CAR_STOP_STATUS;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "CONTROL"))
{
m_app_status.work = 2;
g_car_status = CAR_MANUAL_OPERATION_STATUS;
}
cmdret = 0;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_cmdname), "小车人工控制"))
{
obj_paras = cJSON_GetObjectItem(obj_root, "paras");
if (obj_paras == NULL)
{
goto EXIT;
}
obj_para = cJSON_GetObjectItem(obj_paras, "control");
if (obj_para == NULL)
{
goto EXIT;
}
if (0 == strcmp(cJSON_GetStringValue(obj_para), "STOP"))
{
g_car_control = CAR_STOP;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "FORWARD"))
{
g_car_control = CAR_FORWARD;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "TURNLEFT"))
{
g_car_control = CAR_TURNLEFT;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "TURNRIGHT"))
{
g_car_control = CAR_TURNRIGHT;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_para), "BCAKWARD"))
{
g_car_control = CAR_BCAKWARD;
}
cmdret = 0;
}
3、小车数据发送配置
小车连接上华为云后,每5秒会向华为云的发送当前小车的状态信息。”serviced”为设备的服务ID,ID为”智能小车”;”data”为设备数据,数据为{“work”:0}(图10)。

图10 小车向华为云发送状态信息
以下是小车上传数据到华为云的部分代码:
oc_mqtt_profile_service_t service;
oc_mqtt_profile_kv_t work;
service.event_time = NULL;
service.service_id = "智能小车";
service.service_property = &work;
service.nxt = NULL;
work.key = "Work";
work.value = &report->work;
work.type = EN_OC_MQTT_PROFILE_VALUE_INT;
work.nxt = NULL;
oc_mqtt_profile_propertyreport(USERNAME, &service);
五、效果
给小车上电之后,等待小车连接华为云,可以看到小车向华为云发送消息。从视频中可以看到华为云接收到的消息为data:{“work”:0},说明小车刚上电后并没有工作。
现在通过华为云向小车下发工作命令。从视频中可以看到在小车的前方和左边都有障碍物。启动小车后小车会先直行,通过超声波传感器获取前方的距离,当距离小于20cm时,小车通过超声波传感器测量左右两边的距离,由于右边的距离比左边大,小车会向右转。从视频中可以看到,小车按照我们预想的方向行动,同时我们可以看到华为云接收到的消息为data:{“work”:1},说明小车现在正在工作。
以下是避障的部分代码:
if (distance < DISTANCE_BETWEEN_CAR_AND_OBSTACLE)
{
car_stop();
LOS_Msleep(500);
car_backward();
printf("This is backward\r\n");
LOS_Msleep(500);
car_stop();
unsigned int ret = engine_go_where();
printf("ret is %d\r\n", ret);
if (ret == CAR_TURN_LEFT)
{
car_left();
LOS_Msleep(800);
}
else if (ret == CAR_TURN_RIGHT)
{
car_right();
LOS_Msleep(800);
}
car_stop();
}
通过华为云下发命令,将小车的工作模式转换成控制模式,我们可以看到华为云接收到的消息为data:{“work”:2},说明小车的行动受我们控制。
- 通过华为云向小车下发直行命令,可以看到小车直行。
- 通过华为云向小车下发左转命令,可以看到小车左转。
- 通过华为云向小车下发右转命令,可以看到小车右转。
- 通过华为云向小车下发后退命令,可以看到小车后退。
六、心得体会
通过本次项目使用搭载OpenHarmony的小凌派RK2206开发板进行开发。小凌派官方教程简介清晰,便于入门。RK2206芯片接口比较丰富,移植适配稳定性较好,整体开发进度比较顺利。让我学习到了如何使用MQTT协议连接华为云去控制小车的工作。通过这一次的应用开发,体验了OpenHarmony和国产芯片开发,是一次不错的学习体验,特此记录![请添加链接描述]













